Artikli sisu:
- Mis on dünaamiline juhtimine
- Seade
- Skeem
- Toimimispõhimõte
- Plussid ja miinused
Auto dünaamiline roolisüsteem, nagu mis tahes muud tüüpi juhtimismehhanism, on loodud rooliratta pöörde ja ratta pöörde suhte ülekandmiseks. Peamine erinevus on võimalus muuta roolisüsteemi ülekandearvu, sõltuvalt roolimisnurgast ja sõiduki kiirusest. Mõelgem üksikasjalikumalt, kuidas dünaamiline roolimehhanism töötab, skeem ja tööpõhimõte, samuti kui palju remont keskmiselt maksma läheb.
Mis on dünaamiline juhtimine

Kui tavapärase roolimisega on kõik selge, siis mis vahe on dünaamilisel roolimehhanismil. Peamine erinevus on võimalus muuta rooliülekande suhet, mis sõltub roolimisnurgast või sõiduki kiirusest tervikuna. Reeglina töötab süsteem koos suuna stabiilsusmehhanismiga ja sõiduki dünaamilise stabiliseerimisega. Kogutud andmete tõttu juhib süsteem automaatselt esirattaid, stabiliseerides seeläbi auto trajektoori.
Esimest korda hakkasid nad dünaamilisest roolisüsteemist rääkima 1998. aastal, seejärel hakkas Toyota seda oma autodele paigaldama, märgistades mehhanismi VGRS (muutuva ülekandearvuga juhtimine)... Tänapäeval leidub dünaamilist roolimist kõige sagedamini Audi autodel, kuigi seda leidub ka Volvo, Mercedese ja teiste premium -autode puhul. Kogu süsteemi aluseks on summeerimismehhanism, mis võib muuta esirataste pöördenurka.
Dünaamiline juhtimisseade

Nagu juba mainitud, on dünaamilise roolisüsteemi põhi- ja põhielemendid summeerimismehhanism, mis võib muuta auto roolirataste pöördenurka. Sõltuvalt tingimustest võib juhtimisnurk suureneda või väheneda nii juhi osalusel kui ka ilma tema osaluseta.
Sama dünaamilise juhtimise summeerimismehhanism asub roolivõllil. Reeglina on ülemine osa ühendatud painduva hammasrattaga splineühenduse abil. Selline käik on valmistatud ovaalse kujuga, seetõttu on see sageli hammastega siduriga ühendatud ainult kahes kohas. Seda on teistest väga lihtne eristada, sellisel siduril on veel 2 hammast, mis aitab mehhanismil toimida. Käigukast ise on jäigalt ühendatud roolivõlliga (selle alumine osa).
Tuleb mõista, et erinevalt paljudest auto turvalisuse ja mugavuse süsteemidest võib dünaamiline roolisüsteem pidevalt töötada või vajadusel selle välja lülitada. Sõltuvalt tootjast võivad dünaamilise roolimise mehhanism ja seade erineda, seetõttu kaaluti eespool peamisi osi ja seadet. Nüüd kaalume summeerimiselemendi skeemi ja süsteemi põhimõtet, samuti peamisi nüansse.
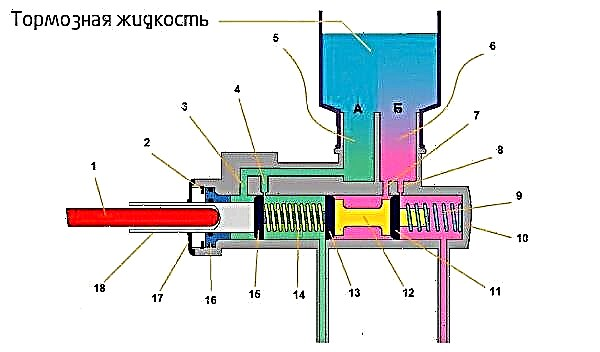
Peamise summeerimismehhanismi skeem

Foto näitab summeerimismehhanismi
- mehhanismi võll;
- elektrimootori peamine staator;
- roolivõll;
- elektrimootori rootori osa (võlli külge jäigalt kinnitatud);
- ovaalne laager;
- käik;
- käigukast.
Sõltuvalt tootjast võib osade kuju ja asukoht erineda, kuid põhikuju ja elementide komplekt jääb enamiku automudelite jaoks samaks.
Kuidas dünaamiline juhtimine töötab

Vaatamata dünaamilise roolimehhanismi võimalikule erinevale struktuurile on enamiku valikute tööpõhimõte sama. Vaatleme mehhanismi toimimise kahte varianti, kui süsteem on passiivne ja aktiveeritud. Esimene hetk, kui süsteem välja lülitatakse, edastatakse sel juhul rooli pöörlemine roolivõlli ülemise osa kaudu, seejärel painduvale hammasrattale ja hammastega sidurile, mille järel jõud kandub edasi roolivõlli alumine osa ja roolimehhanism ise. Sellisel juhul ei muutu ülekandearv., kuna süsteem on välja lülitatud ja ei saa juhti aidata. Reeglina on sõiduki dünaamiline stabiliseerimissüsteem samuti välja lülitatud või töötab minimaalsete võimalustega. Sageli lülitatakse süsteem välja halva teekatte või väikese kiiruse korral, kus rooli juhtimine segab ainult roolimist.

Kui dünaamiline roolimehhanism on aktiivne, on tööpõhimõte erinev. Elektrimootorile antakse vool, mille tõttu elektrimootori pöörlemine edastatakse spetsiaalsele ovaalsele laagrile, seejärel painduvale hammasrattale ja lõpuks hammastega sidurile. Selle konstruktsiooni tõttu nihutab laagri täielik pöörlemine hammasratta võlli telje keskpunkti suhtes 3,5 kraadi. Selle tulemusena saavutatakse negatiivne või positiivne summeerimismoment. Juhi jaoks tähendab see seda, et rataste pööramiseks tuleb rooli enam -vähem keerata.
Summeerimismehhanismi elektrimootori sama juhtimist teostab elektrooniline juhtseade. Sõltuvalt sõidustiilist, teekattest ja sõidutingimustest (juhtseade saab selle kõik spetsiaalsetelt anduritelt või muudelt turvasüsteemidelt), arvutab juhtseade vajaliku juhtimisnurga, samuti käiguhetkede arvu. Kui me räägime auto dünaamilisest stabiliseerimissüsteemist, siis käivitatakse siin ka dünaamiline roolimine. Sellisel juhul arvutab juhtseade automaatrežiimis roolide juhtimismomendi, samuti vajaliku roolinurga.

Selliste parameetrite ja automaatse töö arvutamiseks võtab süsteem sageli aluseks sõiduki kiiruse (määratud ratta pöörlemisanduriga) ja juhi määratud nurga. Samuti on võimalik, et elektrooniline juhtseade kasutab teavet teistest turvasüsteemidest, näiteks suunastabiilsusanduritest, samuti kokkupõrke vältimise süsteemidest.
Dünaamilise juhtimise eelised ja puudused

Nagu igal mehhanismil, on dünaamilisel juhtimisel eeliseid ja puudusi. Selle eelisega võime märkida juhile antavat abi auto suurel kiirusel stabiliseerimisel ja juhitavuse parandamisel. See on minimaalne nimekiri sellest, mida peaksite antud mehhanismist kõige sagedamini ootama.
Negatiivseid punkte on palju vähem, kuid nagu näitab praktika ja elusituatsioonid, halvendab dünaamiline roolisüsteem teatud hetkedel ainult juhitavust, eriti kui ettearvamatult peate rooli järsult keerama ja kokkupõrget vältima või kui peate rooli keerama. ratas sageli halva tee tõttu.
Mis iganes see oli, kui valida, kas paigaldada dünaamiline roolisüsteem või mitte - ühemõtteline vastus on jah, see on vajalik. See on täiendav kaitse ja vajadusel saab selle igal ajal keelata.